

Qi Yang, Dongwei Li, Xin Zhang, Xinyu Cai, and Shengbing Sun
School of Mechanical Engineering, Shenyang Ligong University, Shenyang, Liaoning,China
Received: March 2, 2026
Accepted: March 18, 2026
Publication Date: April 25, 2026
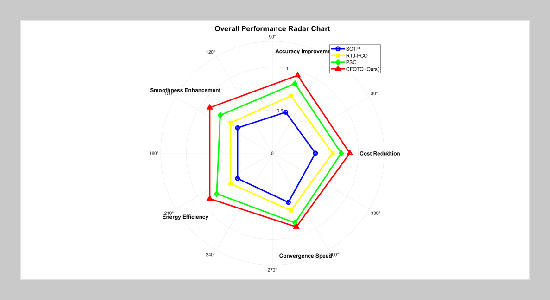
Overall Performance Radar Chart
Copyright The Author(s). This is an open access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are cited.
Download Citation: BibTeX | http://dx.doi.org/10.6180/jase.202609_32.012
In high-precision robotic tasks, achieving optimal trajectory smoothness and dynamic performance is a critical challenge. Traditional integer-order optimization methods often fail to accurately capture intrinsic nonlinear dynamics and long-term memory effects, creating a performance bottleneck. To overcome these limitations, this paper proposes a novel framework: Composite Fractional Objective for Trajectory Optimization (CFOTO). By integrating fractional calculus theory, we construct a composite objective function that incorporates both a fractional norm and a fractional-order smoothness term, which is solved using the fmincon solver. Extensive comparative simulations benchmark CFOTO against three classical and state-of-the-art planning methods. The results demonstrate that CFOTO achieves superior overall performance, exhibiting distinct advantages in trajectory smoothness and algorithmic convergence speed. This research provides a high-performance solution for robotic trajectory planning and offers practical evidence for applying fractional calculus in intelligent control.
Keywords: Trajectory Planning, Fractional Calculus, Nonlinear Optimization, Robotic Manipulator, Smoothness
- [1] R. Gautam, A. Gedam, A. Zade, and A. Mahawadiwar, (2017) “Review on development of industrial robotic arm” International Research Journal of Engineering and Technology (IRJET) 4(03): 429.
- [2] T. Ginoya, Y. Maddahi, and K. Zareinia, (2021) “A historical review of medical robotic platforms” Journal of Robotics 2021(1): 6640031. DOI: https://doi.org/10.1155/2021/6640031.
- [3] A. Stolfi, P. Gasbarri, and A. K. Misra, (2020) “A two-arm flexible space manipulator system for post-grasping manipulation operations of a passive target object” Acta Astronautica 175: 66–78. DOI: https://doi.org/10.1016/j.actaastro.2020.04.045.
- [4] K.-H. Rew and K.-S. Kim. “Using asymmetric S-curve profile for fast and vibrationless motion”. In: 2007 International Conference on Control, Automation and Systems. IEEE. 2007, 500–504. DOI: 10.1109/ICCAS.2007.4406961.
- [5] P. Lambrechts, M. Boerlage, and M. Steinbuch, (2005) “Trajectory planning and feedforward design for electromechanical motion systems” Control Engineering Practice 13(2): 145–157. DOI: https://doi.org/10.1016/j.conengprac.2004.02.010.
- [6] A. Madridano, A. Al-Kaff, D. Martín, and A. De La Escalera, (2021) “Trajectory planning for multi-robot systems: Methods and applications” Expert Systems with Applications 173: 114660. DOI: https://doi.org/10.1016/j.eswa.2021.114660.
- [7] C. Kohrt, R. Stamp, A. Pipe, J. Kiely, and G. Schiedermeier, (2013) “An online robot trajectory planning and programming support system for industrial use” Robotics and Computer-Integrated Manufacturing 29(1): 71–79. DOI: https://doi.org/10.1016/j.rcim.2012.07.010.
- [8] R. Lampariello, D. Nguyen-Tuong, C. Castellini, G. Hirzinger, and J. Peters. “Trajectory planning for optimal robot catching in real-time”. In: 2011 IEEE International Conference on Robotics and Automation. IEEE. 2011, 3719–3726. DOI: 10.1109/ICRA.2011.5980114.
- [9] X. Li, Z. Sun, D. Cao, Z. He, and Q. Zhu, (2015) “Real-time trajectory planning for autonomous urban driving: Framework, algorithms, and verifications” IEEE/ASME Transactions on mechatronics 21(2): 740–753. DOI: 10.1109/TMECH.2015.2493980.
- [10] V. Rajan. “Minimum time trajectory planning”. In: Proceedings. 1985 IEEE International Conference on Robotics and Automation. 2. IEEE. 1985, 759–764. DOI: 10.1109/ROBOT.1985.1087280.
- [11] A. Gasparetto, P. Boscariol, A. Lanzutti, and R. Vidoni, (2015) “Path planning and trajectory planning algorithms: A general overview” Motion and operation planning of robotic systems: Background and practical approaches: 3–27. DOI: 10.1007/978-3-319-14705-5_1.
- [12] C. Richter, A. Bry, and N. Roy. “Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments”. In: Robotics Research: The 16th International Symposium ISRR. Springer. 2016, 649–666. DOI: 10.1007/978-3-319-28872-7_37.
- [13] Y. Guan, K. Yokoi, O. Stasse, and A. Kheddar. “On robotic trajectory planning using polynomial interpolations”. In: 2005 IEEE international conference on robotics and biomimetics-ROBIO. IEEE. 2005, 111–116. DOI: 10.1109/ROBIO.2005.246411.
- [14] H. Wang, H. Wang, J. Huang, B. Zhao, and L. Quan, (2019) “Smooth point-to-point trajectory planning for industrial robots with kinematical constraints based on high-order polynomial curve” Mechanism and Machine Theory 139: 284–293. DOI: https://doi.org/10.1016/j.mechmachtheory.2019.05.002.
- [15] T. Buhet, E. Wirbel, A. Bursuc, and X. Perrotton, (2020) “Plop: Probabilistic polynomial objects trajectory planning for autonomous driving” arXiv preprint arXiv:2003.08744.
- [16] J. Park, J. Kim, I. Jang, and H. J. Kim. “Efficient multi-agent trajectory planning with feasibility guarantees using relative bernstein polynomial”. In: 2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE. 2020, 434–440. DOI: 10.1109/ICRA40945.2020.9197162.
- [17] F. Huo, S. Zhu, H. Dong, and W. Ren, (2024) “A new approach to smooth path planning of Ackermann mobile robot based on improved ACO algorithm and B-spline curve” Robotics and Autonomous Systems 175: 104655. DOI: https://doi.org/10.1016/j.robot.2024.104655.
- [18] R. Van Hoek, J. Ploeg, and H. Nijmeijer, (2021) “Cooperative driving of automated vehicles using B-splines for trajectory planning” IEEE Transactions on Intelligent Vehicles 6(3): 594–604. DOI: 10.1109/TIV.2021.3072679.
- [19] H. Kano and H. Fujioka. “B-spline trajectory planning with curvature constraint”. In: 2018 Annual American Control Conference (ACC). IEEE. 2018, 1963–1968. DOI: 10.23919/ACC.2018.8431703.
- [20] N. T. Nguyen, L. Schilling, M. S. Angern, H. Hamann, F. Ernst, and G. Schildbach. “B-spline path planner for safe navigation of mobile robots”. In: 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE. 2021, 339–345. DOI: 10.1109/IROS51168.2021.9636612.
- [21] L. Tian and C. Collins, (2004) “An effective robot trajectory planning method using a genetic algorithm” Mechatronics 14(5): 455–470. DOI: https://doi.org/10.1016/j.mechatronics.2003.10.001.
- [22] X. Zhang, R. Liu, J. Ren, and Q. Gui, (2022) “Adaptive fractional image enhancement algorithm based on rough set and particle swarm optimization” Fractal and Fractional 6(2): 100. DOI: 10.3390/fractalfract6020100.
- [23] C. Lee and B. Lee. “Planning of straight line manipulator trajectory in Cartesian space with torque constraints”. In: The 23rd IEEE Conference on Decision and Control. 1984, 1603–1609. DOI: 10.1109/CDC.1984.272352.
- [24] A. Gasparetto and V. Zanotto, (2010) “Optimal trajectory planning for industrial robots” Advances in Engineering Software 41(4): 548–556. DOI: https://doi.org/10.1016/j.advengsoft.2009.11.001.
- [25] G. Wu and S. Zhang, (2022) “Real-time jerk-minimization trajectory planning of robotic arm based on polynomial curve optimization” Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science 236(21): 10852–10864. DOI: 10.1177/09544062221106632.
- [26] Ö. Ekrem and B. Aksoy, (2023) “Trajectory planning for a 6-axis robotic arm with particle swarm optimization algorithm” Engineering Applications of Artificial Intelligence 122: 106099. DOI: https://doi.org/10.1016/j.engappai.2023.106099.
- [27] J.-X. Zhang, X. Zhang, D. Boutat, and D.-Y. Liu. Fractional-order complex systems: Advanced control, intelligent estimation and reinforcement learning image-processing algorithms. 2025. DOI: 10.3390/fractalfract9020067.
- [28] X. Zhang and L. Dai, (2022) “Image enhancement based on rough set and fractional order differentiator” Fractal and Fractional 6(4): 214. DOI: 10.3390/fractalfract6040214.
- [29] X. Zhang and Y. Chen, (2018) “Admissibility and robust stabilization of continuous linear singular fractional order systems with the fractional order α: The 0< α< 1 case” ISA transactions 82: 42–50. DOI: https://doi.org/10.1016/j.isatra.2017.03.008.
- [30] X. Wang, X. Zhang, W. Pedrycz, S.-H. Yang, and D. Boutat, (2024) “Consensus of TS fuzzy fractional-order, singular perturbation, multi-agent systems” Fractal and Fractional 8(9): 523. DOI: 10.3390/fractalfract8090523.
- [31] R. Chartrand, (2007) “Exact reconstruction of sparse signals via nonconvex minimization” IEEE Signal Processing Letters 14(10): 707–710. DOI: 10.1109/LSP.2007.898300.