

Received: May 22, 2024
Accepted: September 16, 2024
Publication Date: April 6, 2026
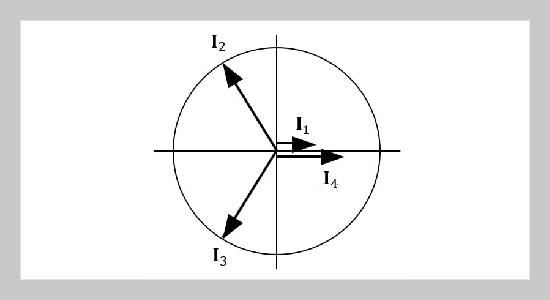
Impulse vector of ETM4 shaper
Copyright The Author(s). This is an open access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are cited.
Download Citation: BibTeX | http://dx.doi.org/10.6180/jase.202508_28(8).0010
Overhead cranes are widely utilized in various industries and for transporting goods. However, the vibrations generated during operation can significantly impact the safety and efficiency of crane work. This issue becomes more critical when dealing with large-sized loads that cannot be overlooked. In such cases, the crane exhibits a double pendulum-like behaviour, and the load vibrations become multi-frequency. This paper proposes an Active Disturbance Rejection Control (ADRC) controller to control the crane’s position combined with the Equal Shaping Time and Magnitude (ETM) input shaping technique to suppress load swinging during lifting operations. Simulations and experiments were performed to confirm the validity of the proposed method.
Keywords: Double-Pendulum Crane; ADRC; Input Shaping; Impulse Vector; Vibration Suppression
- [1] L. Ramli, Z. Mohamed, A. M. Abdullahi, H. Jaafar, and I. M. Lazim, (2017) “Control strategies for crane systems: A comprehensive review” Mechanical Systems
and Signal Processing 95: 1–23. DOI: https://doi.org/10.1016/j.ymssp.2017.03.015. - [2] H. I. Jaafar, Z. Mohamed, N. A. M. Subha, A. R. Husain, F. S. Ismail, L. Ramli, M. O. Tokhi, and M. A. Shamsudin, (2019) “Efficient control of a nonlinear double-pendulum overhead crane with sensorless payload motion using an improved PSO-tuned PID controller” Journal of Vibration and Control 25(4): 907–921. DOI: 10.1177/1077546318804319. eprint: https://doi.org/10.1177/1077546318804319.
- [3] N. Sun, T. Yang, Y. Fang, Y. Wu, and H. Chen, (2019) “Transportation Control of Double-Pendulum Cranes With a Nonlinear Quasi-PID Scheme: Design and Experiments” IEEE Transactions on Systems, Man, and Cybernetics: Systems 49(7): 1408–1418.
- [4] N. Sun, Y. Wu, Y. Fang, and H. Chen, (2018) “Nonlinear Antiswing Control for Crane Systems With DoublePendulum Swing Effects and Uncertain Parameters: Design and Experiments” IEEE Transactions on Automation Science and Engineering 15(3): 1413–1422. DOI: 10.1109/TASE.2017.2723539.
- [5] B. Lu, Y. Fang, and N. Sun, (2019) “Enhanced-coupling adaptive control for double-pendulum overhead cranes with payload hoisting and lowering” Automatica 101: 241–251. DOI: https://doi.org/10.1016/j.automatica.2018.12.009.
- [6] L. Yang and H. Ouyang, (2022) “Precision-positioning adaptive controller for swing elimination in threedimensional overhead cranes with distributed mass beams” ISA Transaction 127: 449–460. DOI: 10.1016/j.isatra.2021.08.035.
- [7] Q. Wu, X. Wang, L. Hua, and M. Xia, (2020) “Dynamic analysis and time optimal anti-swing control of double pendulum bridge crane with distributed mass beams” Mechanical Systems and Signal Processing: DOI: https://doi.org/10.1016/j.ymssp.2020.106968.
- [8] Q. Wu, X. Wang, L. Hua, and M. Xia, (2021) “Improved time optimal anti-swing control system based on low-pass filter for double pendulum crane system with distributed mass beam” Mechanical Systems and Signal Processing 151: 107444. DOI: https://doi.org/10.1016/j.ymssp.2020.107444.
- [9] M. Zhang, Y. Zhang, and X. A. Cheng, (2019) “Enhanced Coupling PD with Sliding Mode Control Method for Underactuated Double-pendulum Overhead Crane
Systems” Int. J. Control Autom. Syst 17: 1579–1488. DOI: 10.1007\s12555-018-0646-0. - [10] H. Ouyang, J. Hu, G. Zhang, L. Mei, and X. Deng, (2019) “Sliding-Mode-Based Trajectory Tracking and Load Sway Suppression Control for Double-Pendulum Overhead Cranes” IEEE Access 7: 4371–4379. DOI: 10.1109/ACCESS.2018.2888563.
- [11] T. Wang, N. Tan, X. Zhang, G. Li, S. Su, J. Zhou, J. Qiu, Z. Wu, Y. Zhai, R. Donida Labati, V. Piuri, and F. Scotti, (2021) “A Time-Varying Sliding Mode Control Method for Distributed-Mass Double Pendulum Bridge Crane With Variable Parameters” IEEE Access 9: 75981–75992. DOI: 10.1109/ACCESS.2021.3079303.
- [12] Q. Wu, X. Wang, L. Hua, and M. Xia, (2021) “Modeling and nonlinear sliding mode controls of double pendulum cranes considering distributed mass beams, varying roped length and external disturbances” Mechanical Systems and Signal Processing 158: 107756. DOI: https://doi.org/10.1016/j.ymssp.2021.107756.
- [13] D. Qian, S. Tong, and S. Lee, (2016) “Fuzzy-logic-based control of payloads subjected to double-pendulum motion in overhead cranes” Automation in Construction 65: 133–143. DOI: doi.org/10.1016/j.autcon.2015.12.014.
- [14] Z. Sun and H. Ouyang, (2022) “Adaptive fuzzy tracking control for vibration suppression of tower crane with distributed payload mass” Automation in Construction 142: 104521. DOI: https://doi.org/10.1016/j.autcon.2022.104521.
- [15] Q. Wu, N. Sun, T. Yang, and Y. Fang, (2024) “Deep Reinforcement Learning-Based Control for Asynchronous Motor-Actuated Triple Pendulum Crane Systems With Distributed Mass Payloads” IEEE Transactions on Industrial Electronics 71(2): 1853–1862. DOI: 10.1109/TIE.2023.3262891.
- [16] M. Kenison and W. Singhose. “Input shaper design for double-pendulum planar gantry cranes”. In: Proceedings of the 1999 IEEE International Conference on Control Applications (Cat. No.99CH36328). 1. 1999, 539–544 vol. 1. DOI: 10.1109/CCA.1999.806702.
- [17] W. E. Singhose, J. Lawrence, K. L. Sorensen, and K. Dooroo, (2006) “Applications and educational uses of crane oscillation control” FME Transactions 34: 175–183.
- [18] K. Chen Chih Peng, W. Singhose, and S. S. Gürleyük. “Initial investigations of hand-motion crane control with double-pendulum payloads”. In: 2012 American Control Conference (ACC). 2012, 6270–6275. DOI: 10.1109/ACC.2012.6315260.
- [19] K. A. Alhazza and Z. N. Masoud, (2016) “Waveform command shaping control of multimode systems” Journal of Sound and Vibration 363: 126–140. DOI: https://doi.org/10.1016/j.jsv.2015.11.010.
- [20] Z. N. Masoud and K. A. Alhazza, (2017) “A smooth multimode waveform command shaping control with selectable command length” Journal of Sound and Vibration 397: 1–16. DOI: https://doi.org/10.1016/j.jsv.2017.02.049.
- [21] S. F. ur Rehman, Z. Mohamed, A. Husain, L. Ramli, M. Abbasi, W. Anjum, and M. Shaheed, (2023) “Adaptive input shaper for payload swing control of a 5-DOF tower crane with parameter uncertainties and obstacle avoidance” Automation in Construction 154: 104963. DOI: https://doi.org/10.1016/j.autcon.2023.104963.
- [22] X. Xie, J. Huang, and Z. Liang, (2013) “Vibration reduction for flexible systems by command smoothing” Mechanical Systems and Signal Processing 39(1): 461–470. DOI: https://doi.org/10.1016/j.ymssp.2013.02.021.
- [23] R. Tang and J. Huang, (2016) “Control of bridge cranes with distributed-mass payloads under windy conditions” Mechanical Systems and Signal Processing 72-73: 409–419. DOI: https://doi.org/10.1016/j.ymssp.2015.11.002.
- [24] Y. Jiahui and H. Jie, (2023) “Control of Beam-Pendulum Dynamics in a Tower Crane With a Slender Jib Transporting a Distributed-Mass Load” IEEE Transactions on Industrial Electronics 70(1): 888–897. DOI: 10.1109/TIE.2022.3148741.
- [25] X. Miao, L. Yang, and H. Ouyang, (2023) “Artificialneural-network-based optimal Smoother design for oscillation suppression control of underactuated overhead cranes with distributed mass beams” Mechanical Systems and Signal Processing 200: 110497. DOI: https://doi.org/10.1016/j.ymssp.2023.110497.
- [26] D. Minh Duc, N. Van Minh, D. Quy Thinh, and D. Trong Hieu, (2023) “Reference response based timevarying vibration suppression control for flexible dynamic systems” Journal of Engineering Science and Technology 18(1): 604–623.
- [27] D. Gruyter. Anti-sway Control for Cranes: Design and Implementation Using MATLAB. De Gruyter, 2017.
- [28] W. Singhose, D. Kim, and M. Kenison, (2008) “Input Shaping Control of Double-Pendulum Bridge Crane Oscillations” J. Dyn. Sys., Meas., Control 130(3): DOI: doi:10.1115/1.2907363.
- [29] J. Han, (2009) “From PID to Active Disturbance Rejection Control” IEEE Transactions on Industrial Electronics 56(3): 900–906. DOI: 10.1109/TIE.2008.2011621.
- [30] G. Herbst, (2013) “A Simulative Study on Active Disturbance Rejection Control (ADRC) as a Control Tool for Practitioners” Electronics 2(3): 246–279. DOI: 10.3390/electronics2030246.
- [31] T. M. Chien, D. T. Hieu, and D. Q. Thinh, (2022) “Development of a Rehabilitation Robot: Modeling and Trajectory Tracking Control” ASEAN Engineering Journal 12(4): 121–129. DOI: 10.11113/aej.v12.17196.
- [32] N. C. Singer and W. P. Seering, (1990) “Preshaping command inputs to reduce system vibration”:
- [33] C. G. Kang, (2019) “Impulse Vectors for Input-Shaping Control: A Mathematical Tool to Design and Analyze Input Shapers” IEEE Control Systems Magazine 39(4): 40–55. DOI: 10.1109/MCS.2019.2913610.
- [34] M. I. Solihin, Wahyudi, and A. Legowo, (2010) “Fuzzy-tuned PID Anti-swing Control of Automatic Gantry Crane” Journal of Vibration and Control 16(1): 127–145. DOI: 10 . 1177 / 1077546309103421. eprint: https://doi.org/10.1177/1077546309103421.