

Ran Liu, Zhiguang Guan, Zhenyuan Zhao, and Qin Sun
School of Construction Machinery, Shandong Jiaotong University, Jinan 250023, China
Received: June 23, 2024
Accepted: September 1, 2024
Publication Date: April 6, 2026
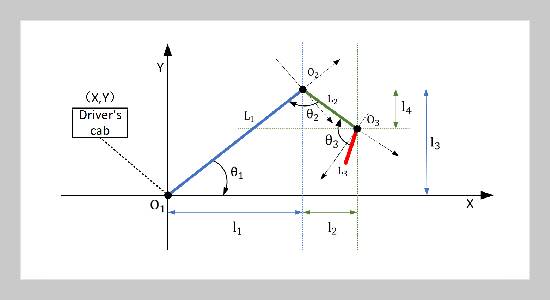
Attitude Cartesian coordinate system.
Copyright The Author(s). This is an open access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are cited.
Download Citation: BibTeX | http://dx.doi.org/10.6180/jase.202508_28(8).0011
Excavators are increasingly used across various industries, especially in dangerous environments such as mines, earthquake relief sites, and more. In these hazardous settings, the personal safety of excavator operators cannot be fully guaranteed. However, the implementation of remote control for excavators can effectively mitigate the risks associated with human operation on-site, thereby enhancing workers’ safety and operational efficiency. The excavator remote control system presented in this paper offers significant improvements compared to traditional excavator control systems, including (1) the realization of unlimited-distance remote control through the intervention of an IoT cloud server and (2) the accomplishment of semi-automatic and autonomous excavator operation via a binocular vision system. Experimental results demonstrate that the cloud-based excavator control system achieves remote control with low latency and high reliability, enabling functions such as walking, steering, and the extension of boom, stick, and bucket.
Keywords: Excavator; Remote operation; Cloud platform; Binocular positioning
- [1] Wen Leyang, Kim Daeho, Liu Meiyin, and Lee SangHyun, (2023) “3D Excavator Pose Estimation Using Projection-Based Pose Optimization for ContactDriven Hazard Monitoring” Journal of Computing in Civil Engineering 37(1): 04022048. DOI: 10.1061/(ASCE)CP.1943-5487.0001060.
- [2] J. Zhao, P. Long, L. Wang, L. Qian, F. Lu, X. Song, D. Manocha, and L. Zhang. AES: Autonomous Excavator System for Real-World and Hazardous Environments. 2020. DOI: 10.48550/ARXIV.2011.04848.
- [3] T. Traunecker, M. Niever, and G. N. Basedow. “Exploring AI-Driven Business Models: Conceptualization and Expectations in the Machinery Industry”. In: 2020 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM). 2020 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM). Journal Abbreviation: 2020 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM). 14, 2020, 567–570. DOI: 10.1109/IEEM45057.2020.9309824.
- [4] R. Rai, M. K. Tiwari, D. Ivanov, and A. Dolgui, (2021) “Machine learning in manufacturing and industry 4.0 applications” International Journal of Production Research 59(16): 4773–4778. DOI: 10.1080/00207543.2021.1956675.
- [5] R. Cioffi, M. Travaglioni, G. Piscitelli, A. Petrillo, and F. De Felice, (2020) “Artificial Intelligence and Machine Learning Applications in Smart Production: Progress, Trends, and Directions” Sustainability 12(2): DOI: 10.3390/su12020492.
- [6] J. Lee, B. Kim, D. Sun, C. Han, and Y. Ahn, (2019) “Development of Unmanned Excavator Vehicle System for Performing Dangerous Construction Work” Sensors 19(22): DOI: 10.3390/s19224853.
- [7] Xinming Hou, Sen Wang, Dianzhe Zhao, Jiahang Lv, Zijian Jia, Xiangrui Zeng, Xiaona Luan, Zihe Zhou, and Jiawei Zhang. “A remote manipulator control system based on a programmable logic controller and internet of things technology”. In: Proc.SPIE. 12636. 25, 2023, 126364B. DOI: 10.1117/12.2675390.
- [8] Y. Shen, J. Wang, C. Feng, and Q. Wang, (2024) “Hybrid-driven autonomous excavator trajectory generation combining empirical driver skills and optimization” Automation in Construction 165: 105523. DOI: 10.1016/j.autcon.2024.105523.
- [9] M. Zou, J. Yu, Y. Lv, B. Lu, W. Chi, and L. Sun, (2023) “A Novel Day-to-Night Obstacle Detection Method for Excavators Based on Image Enhancement and Multisensor Fusion” IEEE Sensors Journal 23(10): 10825–10835. DOI: 10.1109/JSEN.2023.3254588.
- [10] G. Liu, Q. Wang, T. Wang, B. Li, and X. Xi, (2024) “Vision-based excavator pose estimation for automatic control” Automation in Construction 157: 105162. DOI: 10.1016/j.autcon.2023.105162.
- [11] Q. H. Le, J. W. Lee, and S. Y. Yang, (2017) “Remote control of excavator using head tracking and flexible monitoring method” Automation in Construction 81: 99–111. DOI: 10.1016/j.autcon.2017.06.015.
- [12] C.-J. Liang, K. M. Lundeen, W. McGee, C. C. Menassa, S. Lee, and V. R. Kamat, (2019) “A vision-based markerless pose estimation system for articulated construction robots” Automation in Construction 104: 80–94. DOI: 10.1016/j.autcon.2019.04.004.
- [13] A. A. Yusof, M. N. A. Saadun, H. Sulaiman, and S. A. Sabaruddin. “The development of tele-operated electro-hydraulic actuator (T-EHA) for mini excavator tele-operation”. In: 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA). 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA). Journal Abbreviation: 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA). 25, 2016, 1–6. DOI: 10.1109/ROMA.2016.7847800.
- [14] C. Frese, A. Zube, P. Woock, T. Emter, N. F. Heide, A. Albrecht, and J. Petereit, (2022) “An autonomous crawler excavator for hazardous environments” Ein autonomer Raupenbagger für menschenfeindliche Umgebungen 70(10): 859–876. DOI: 10.1515/auto2022-0068.
- [15] D. Liu, J. Kim, and Y. Ham, (2023) “Multi-user immersive environment for excavator teleoperation in construction” Automation in Construction 156: 105143. DOI: 10.1016/j.autcon.2023.105143.
- [16] L. Zhang, J. Zhao, P. Long, L. Wang, L. Qian, F. Lu, X. Song, and D. Manocha, (2021) “An autonomous excavator system for material loading tasks” Science Robotics 6(55): eabc3164. DOI: 10.1126/scirobotics.abc3164.