

School of Mechanical Engineering, Shenyang Ligong University, Shenyang, Liaoning, China
Received: April 23, 2026
Accepted: May 16, 2026
Publication Date: June 1, 2026
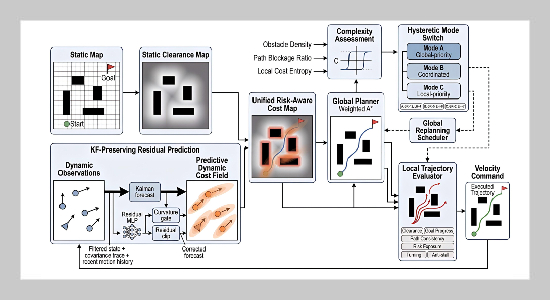
Overall framework of the PADP method
Copyright The Author(s). This is an open access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are cited.
Download Citation: BibTeX | http://dx.doi.org/10.6180/jase.202609_32.061
To tackle the critical challenges confronted by mobile robots in dynamic environments, such as the demand for short replanning time, high computational complexity, and unreliable planning results arising from environmental uncertainty, the majority of existing methods merely implement local obstacle avoidance in the post-processing phase, which leads to limited improvements in global path optimization. Moreover, the fixed coordination mechanism between global and local planning is difficult to adapt to varying scenario pressures. To this end, this paper proposes a planning method with a predictive dynamic cost field and a complexity-adaptive coordination mechanism (PADP), which employs Kalman-filter-based prediction to construct a direction-aware dynamic cost field and integrates it into global path generation. An online complexity indicator composed
of obstacle density and other metrics is designed to dynamically adjust planning weights. Meanwhile, a lightweight residual correction module is introduced to reduce multi-step prediction errors while retaining the core Kalman filtering framework. Experimental results based on MATLAB grid simulations demonstrate that PADP achieves an overall success rate of 80.56% and has the minimum average collision count among all comparison methods in 36 dynamic scenarios. The hybrid PADP-KFRes reduces the prediction RMSE from 1.053 to 0.457.
Keywords: Mobile robot; Kalman filter; Dynamic path planning; Adaptive coordination mechanism
- [1] G. Fragapane, R. de Koster, F. Sgarbossa, et al., (2021) “Planning and control of autonomous mobile robots for intralogistics: Literature review and research agenda” European Journal of Operational Research 294(2): 405–426. DOI: 10.1016/j.ejor.2021.01.019.
- [2] M. Aizat, A. Azmin, and W. Rahiman, (2023) “A survey on navigation approaches for automated guided vehicle robots in dynamic surrounding” IEEE Access 11: 33934–33955. DOI: 10.1109/ACCESS.2023.3263734.
- [3] R. Moller, A. Furnari, S. Battiato, et al., (2021) “A survey on human-aware robot navigation” Robotics and Autonomous Systems 145: 103837. DOI: 10.1016/j.robot.2021.103837.
- [4] C. Mavrogiannis, F. Baldini, A. Wang, et al., (2023) “Core challenges of social robot navigation: A survey” ACM Transactions on Human-Robot Interaction 12(3): 1–39. DOI: 10.1145/3583741.
- [5] X. Deng, R. Li, L. Zhao, et al., (2021) “Multi-obstacle path planning and optimization for mobile robot” Expert Systems with Applications 183: 115445. DOI: 10.1016/j.eswa.2021.115445.
- [6] K. Katona, H. Neamah, and P. Korondi, (2024) “Obstacle avoidance and path planning methods for autonomous navigation of mobile robot” Sensors 24(11): 3573. DOI: 10.3390/s24113573.
- [7] Y. Li, R. Jin, X. Xu, et al., (2022) “A mobile robot path planning algorithm based on improved A* algorithm and dynamic window approach” IEEE Access 10: 57736–57747. DOI: 10.1109/ACCESS.2022.3179397.
- [8] M. Kobayashi, H. Zushi, T. Nakamura, et al., (2023) “Local path planning: Dynamic window approach with Q-learning considering congestion environments for mobile robot” IEEE Access 11: 96733–96742. DOI: 10.1109/ACCESS.2023.3311023.
- [9] Y. Sun, W. Wang, M. Xu, et al., (2023) “Local path planning for mobile robots based on fuzzy dynamic window algorithm” Sensors 23(19): 8260. DOI: 10.3390/s23198260.
- [10] L. Xiang, X. Li, H. Liu, et al., (2022) “Parameter fuzzy self-adaptive dynamic window approach for local path planning of wheeled robot” IEEE Open Journal of Intelligent Transportation Systems 3: 1–6. DOI: 10.1109/OJITS.2021.3137931.
- [11] M. Shoeib, J. Lewandowski, and A. Omara, (2024) “A novel methodology for vision-based path planning and obstacle avoidance in mobile robot applications” Advanced Robotics 38(12): 802–817. DOI: 10.1080/01691864.2024.2315591.
- [12] K. Zheng, (2024) “Autonomous obstacle avoidance and trajectory planning for mobile robot based on dual-loop trajectory tracking control and improved artificial potential field method” Actuators 13(1): 37. DOI: 10.3390/act13010037.
- [13] S. Shao, J. Zhang, T. Wang, et al., (2024) “Dynamic obstacle-avoidance algorithm for multi-robot flocking based on improved artificial potential field” IEEE Transactions on Consumer Electronics 70(1): 4388–4399. DOI: 10.1109/TCE.2023.3340327.
- [14] C. Gong, Y. Yang, L. Yuan, et al., (2022) “An improved ant colony algorithm for integrating global path planning and local obstacle avoidance for mobile robot in dynamic environment” Mathematical Biosciences and Engineering 19(12): 12405–12426. DOI: 10.3394/mbe.2022579.
- [15] J. Hou, W. Jiang, Z. Luo, et al., (2024) “Dynamic path planning for mobile robots by integrating improved sparrow search algorithm and dynamic window approach” Actuators 13(1): 24. DOI: 10.3390/act13010024.
- [16] Y. Li, J. Zhao, Z. Chen, et al., (2023) “A robot path planning method based on improved genetic algorithm and improved dynamic window approach” Sustainability 15(5): 4656. DOI: 10.3390/su15054656.
- [17] W. Chen, L. Liu, L. Zhang, et al., (2025) “Path planning of mobile robots with an improved grey wolf optimizer and dynamic window approach” Applied Sciences 15(7): 3999. DOI: 10.3390/app15073999.
- [18] M. Pei, H. An, B. Liu, et al., (2022) “An improved Dyna-Q algorithm for mobile robot path planning in unknown dynamic environment” IEEE Transactions on Systems, Man, and Cybernetics: Systems 52(7): 4415–4425. DOI: 10.1109/TSMC.2021.3096935.
- [19] R. Huang, C. Qin, J. Li, et al., (2023) “Path planning of mobile robot in unknown dynamic continuous environment using reward-modified deep Q-network” Optimal Control Applications and Methods 44(3): 1570–1587. DOI: 10.1002/oca.2781.
- [20] Y. Zhang and P. Chen, (2023) “Path planning of a mobile robot for a dynamic indoor environment based on an SAC-LSTM algorithm” Sensors 23(24): 9802. DOI: 10.3390/s23249802.
- [21] Y. Chen, Y. Wang, B. Li, et al., (2024) “Multi-robot navigation based on velocity obstacle prediction in dynamic crowded environments” Industrial Robot 51(4): 607–616. DOI: 10.1108/IR-12-2023-0337.
- [22] H. Wang, L. He, S. Zhang, et al., (2025) “Mobile robot path planning considering obstacle gap features” Applied Sciences 15(11): 5979. DOI: 10.3390/app15115979.