REFERENCES
- [1] Ott, E., C. Grebogi, and J. A. Yorke (1990) Controlling Chaos, Physical Review Letters 64, 1196. doi: 10. 1103/PhysRevLett.64.1196
- [2] Gritli, H., S. Belghith, and N. Khraief (2015) Ogy based control of Chaos in semi-passive dynamic walking of a torso-driven biped robot, Nonlinear Dynamics 79(2), 1363�1384. doi: 10.1007/s11071-014-1747-9
- [3] Gritli,H., and S. Belghith (2017) Walking dynamicsof the passive compass-gait model under ogy-based control: Emergence of bifurcations and Chaos, Communications in Nonlinear Science and Numerical Simulation 47, 308�327. doi: 10.1016/j.cnsns.2016.11.022
- [4] Gritli, H., and S. Belghith (2018) Diversity in the nonlinear dynamic behavior of a one-degree-of-freedom impact mechanical oscillator under ogy-based state feedback control law: Order, Chaos and exhibition of the border-collision bifurcation, Mechanism and Machine Theory 124, 1�41. doi: 10.1016/j. mechmachtheory.2018.02.001
- [5] Kittel, A., J. Parisi, and K. Pyragas (1995) Delayed feedback control of Chaos by self-adapted delay time, Physics Letters A 198, 433�436. doi: 10.1016/03759601(95)00094-J
- [6] Fradkov, A. L., and A. Y. Pogromsky (1998) Introduction to Control of Oscillations and Chaos, Volume 35, World Scientific. doi: 10.1142/9789812798619_0004
- [7] Akhmet, M., and M. O. Fenm (2017) Unpredictable Sequences and Poincaré Chaos, arXiv preprint arXiv: 1704.06963.
- [8] Pyragas, K. (1992) Continuous control of Chaos by self-controlling feedback, Physics Letters A 170, 421– 428. doi: 10.1016/0375-9601(92)90745-8
- [9] Rezaie, B., and M.-R. J. Motlagh (2011) An adaptive delayed feedback control method for stabilizing chaotic time-delayed systems, Nonlinear Dynamics 64, 167–176. doi: 10.1007/s11071-010-9855-7
- [10] Yan, Z. (2005) Controlling hyperchaos in the new hyperchaotic Chen system, Applied Mathematics and Computation 168(2), 1239–1250. doi: 10.1016/j.amc. 2004.10.016
- [11] Dou, F. Q., J. A. Sun, W. S. Duan, and K. P. Lü (2009) Controlling hyperchaos in the new hyperchaotic system, Communications in Nonlinear Science and Numerical Simulation 14(2), 552–559. doi: 10.1016/j. cnsns.2007.10.009
- [12] Tao, C., C. Yang, Y. Luo, H. Xiong, and F. Hu (2005) Speed feedback control of chaotic system,”Chaos, Solitons & Fractals 23(1), 259–263. doi: 10.1016/j. chaos.2004.04.009
- [13] Azar, A. T., and S. Vaidyanathan (2015) Chaos Modeling and Control Systems Design, Volume 581, Springer. doi: 10.1007/978-3-319-13132-0_7
- [14] Tao, C., and C. Yang (2008) Three control strategies for the Lorenz chaotic system, Chaos, Solitons & Fractals 35(5), 1009–1014. doi:10.1016/j.chaos.2006.06.089
- [15] Zhu,C.,andZ.Chen(2008)Feedbackcontrolstrategies for the Liu chaotic system, Physics Letters A 372(22), 4033–4036. doi:10.1016/j.physleta.2008.03.018
- [16] Zhu, C. (2010) Controlling hyperchaos in hyperchaotic Lorenz system using feedback controllers, Applied Mathematics and Computation 216(10), 3126–3132. doi: 10.1016/j.amc.2010.04.024
- [17] Hilborn, R. C., S. Coppersmith, A. J. Mallinckrodt, S. McKay, et al. (1994) Chaos and nonlinear dynamics: an introduction for scientists and engineers, Computers in Physics 8, 689–689. doi: 10.1063/1.4823351
- [18] Sparrow, C. (2012) The Lorenz Equations: Bifurcations, Chaos, and Strange Attractors, Volume 41, Springer Science & Business Media.
- [19] Tabor, M., and J. Weiss (1981) Analytic structure of the Lorenz system, Physical Review A 24, 2157. doi: 10.1103/PhysRevA.24.2157
- [20] Etkin, D. (2014) Disaster Theory: an Interdisciplinary Approach to Concepts and Causes, ButterworthHeinemann.
- [21] Boeing, G. (2016) Visual analysis of nonlinear dynamic systems: chaos, fractals, self-similarity and the limits of prediction, Systems 4, 37. doi: 10.3390/ systems4040037
- [22] Kuznetsov, N. (2016) The Lyapunov dimensionand its estimation via the Leonov method, Physics Letters A 380(25�26), 2142–2149. doi: 10.1016/j.physleta.2016. 04.036
- [23] Dadras, S., H. R. Momeni, and G. Qi (2010) Analysis of a new 3D smooth autonomous systemwith different wing chaotic attractors and transient Chaos, Nonlinear Dynamics 62(1�2), 391–405. doi: 10.1007/s11071010-9726-2
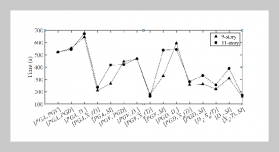
. (a) x1,x 2 and x3 are unstable vs. time.(b) The trajectory attract to none of fixed points. This system has three fixed points as listed in Table 1.")